
举手检测
工勘描述
| 项目 | 要求 |
|---|---|
| 适用场景 | 适用于室外,光照条件良好场景的,举手检测;画面可分分辨人员、手部、肩部特征;识别距离小于20m且大于15米最佳(200万@6mm) |
| 禁用场景 | 逆光、强光、弱光、反光等光线条件远距离(>20m)识别条件画质不清晰,人体姿态质量不符,双臂特征不清晰 |
| 支持功能 | 支持举手检测 |
| 相机要求 | 室内安装高度2.5~4m,室外安装高度5-7m俯视角度15°~60°,最佳角度30°~45°摄像头画面正立,无旋转,翻转推荐200万~500万像素,可见光,画质清晰,无畸变 |
| 目标大小 | 目标大小不小于画面大小的1% |
| 识别距离 | 大于15m且小于20m最佳(200万@6mm) |
| 配置要求 | 置信度与算法参数保持默认值 |
| 算法逻辑 | 首先检测人体,然后检测双臂的腕部、肘部和肩部关键点。如果任一只手臂满足以下条件:腕部高于肘部和肩部,且肘部高于肩部,同时腕、肘、肩三者构成的夹角大于90°,则触发告警;否则不予告警。 |
告警示例

推荐场景

禁用场景

配置说明
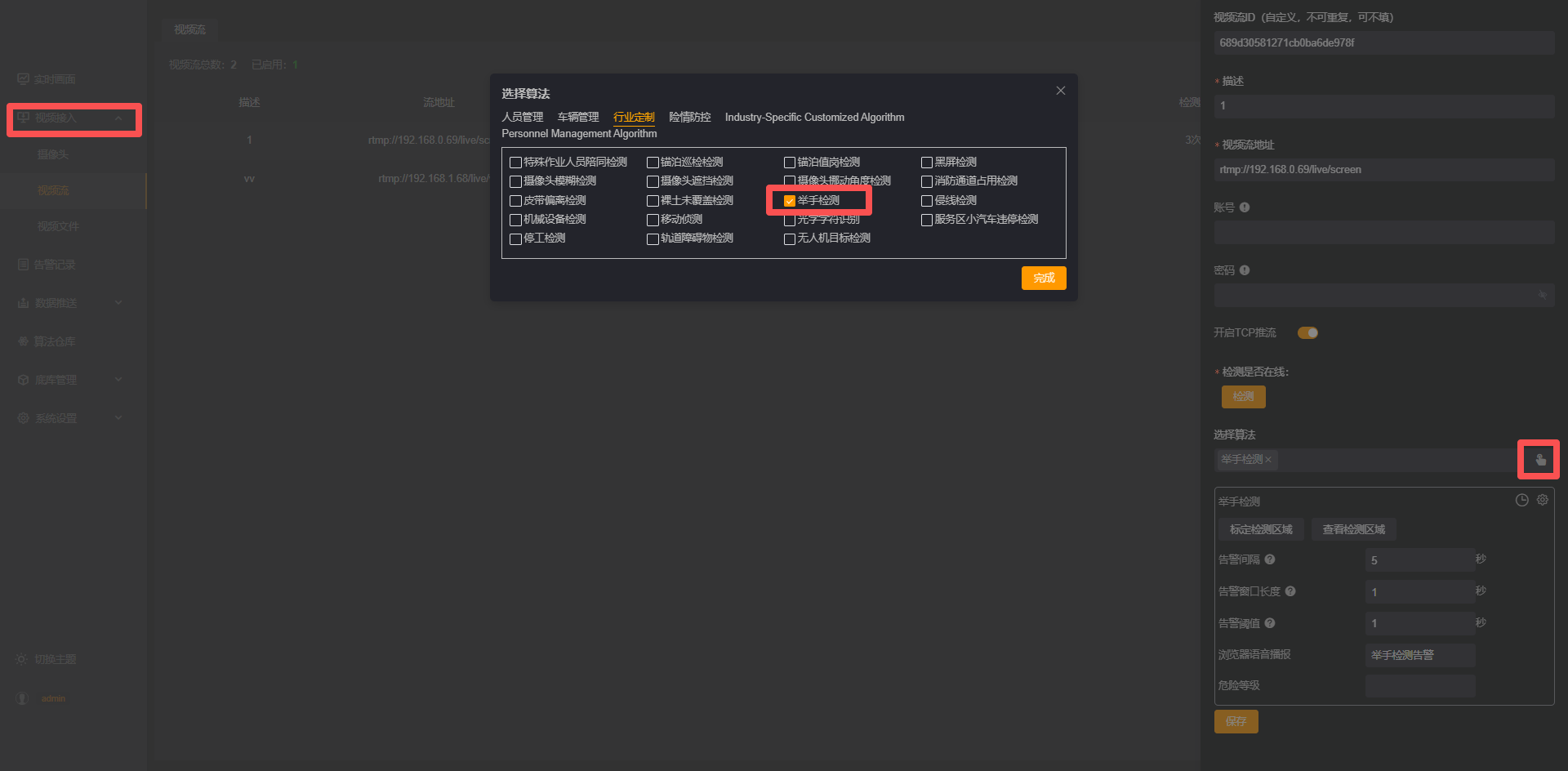
1. 举手检测算法
在【视频接入】中的【选择算法】中选择举手检测算法。完成后点击【保存】。
3. 常见问题
Q1: 算法产生漏报,如何处理?
举手检测算法在做人体姿态质量判断之前,需要先检测人,只有先检测到人才能判断此人是否举手。因此算法漏报往往通常由两种原因导致。 1、检测框时有时无,说明检测人的置信度在阈值附近变化。 2、检测框的标签在人和举手之间频繁切换,无法持续指定时间。说明检测框的尺寸浮动,导致二次推理输入变化 3、举手目标快速移动,目标追踪失败 首先,检测区域必须满足下方两个条件
- 检测距离小于10m,人体、双臂特征清晰可见
- 身体姿态满足质量要求(至少一条胳膊的手腕关键点、肘部关键点与肩部关键点同时检测到)
检测框时有时无(无人体目标框):
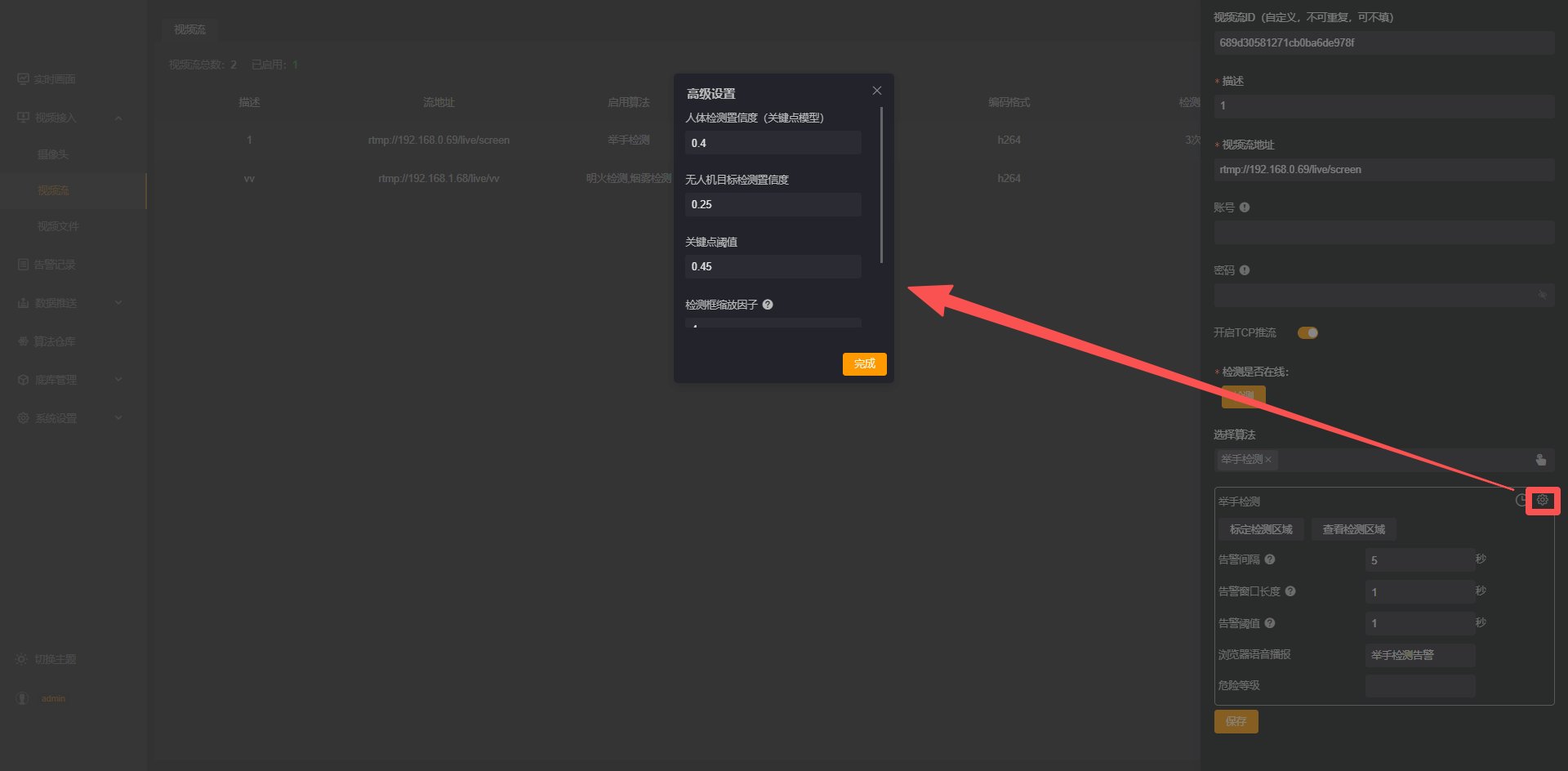
- 降低【无人机目标检测置信度】。如0.5,尝试以0.1的步长逐步降低人体检测置信度,下限值建议0.1。
检测框的标签在人和举手之间频繁切换,无法持续指定时间。:
- 若检测框的标签在人和举手之间频繁切换,无法持续指定时间。表示当前目标未达到人体姿态质量标准。可尝试降低【关键点阈值】。如0.5,尝试以0.1的步长逐步降低关键点阈值,下限值建议0.3。并且增加【检测框缩放因子】。如2.0,尝试以0.1的步长逐步增加检测框缩放因子,上限值建议5.0
- 建议先增加【检测框缩放因子】,观察能否持续检测告警行为。若仍然无法持续,可进一步增加【检测框缩放因子】。增加到5之后若仍然无法持续检测告警行为,则尝试降低【关键点阈值】和【人体检测置信度(关键点模型)】。
举手目标快速移动,目标追踪失败。
- 为了保证算法检测效果,应当要求被检测目标,在检测持续期间保持静止和相同的举手姿势。即便举手但快速移动的目标会出现无法被检测的情况。
Q2: 算法产生误报,如何处理?
人体误报(检测出非人体目标框):
- 提高【无人机目标检测置信度】。如0.5,尝试以0.1的步长逐步提高人体检测置信度,上限值建议0.8。
未举手误报(没有举手仍告警):
- 提高【关键点阈值】。如0.4,尝试以0.05的步长逐步提高【关键点阈值】,上限值建议0.8。
在推荐场景下,若仍出现大量肉眼可见的误报、漏报,请联系售后处理。
参数配置方法,如下图。
真诚点赞 诚不我欺
回复